What are the Different Types of Industrial Robots and Their Applications?
Countless manufacturers use industrial robots to automate tasks, enhance worker safety, and increase overall production output while reducing waste and operating costs. With industrial robots becoming more prevalent in manufacturing environments, there has been an increased demand for numerous different types of industrial robots to fit specific applications and industries. In this post, we will explore what types of industrial robots are available on the market, how they work, and what applications or industries they are typically used in.
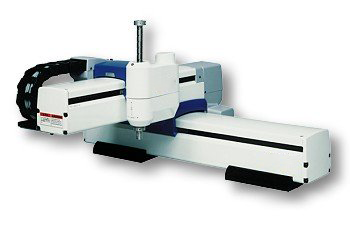
Cartesian Robots
Cartesian robots, which are also called linear robots or gantry robots, are industrial robots that work on three linear axes that use the Cartesian Coordinate system (X, Y, and Z), meaning they move in straight lines on 3-axis (up and down, in and out, and side to side). Cartesian robots are a popular choice due to being highly flexible in their configurations, giving users the ability to adjust the robot’s speed, precision, stroke length, and size. Cartesian Robots are one of the most commonly used robot types for industrial applications and are often used for CNC machines and 3D printing.
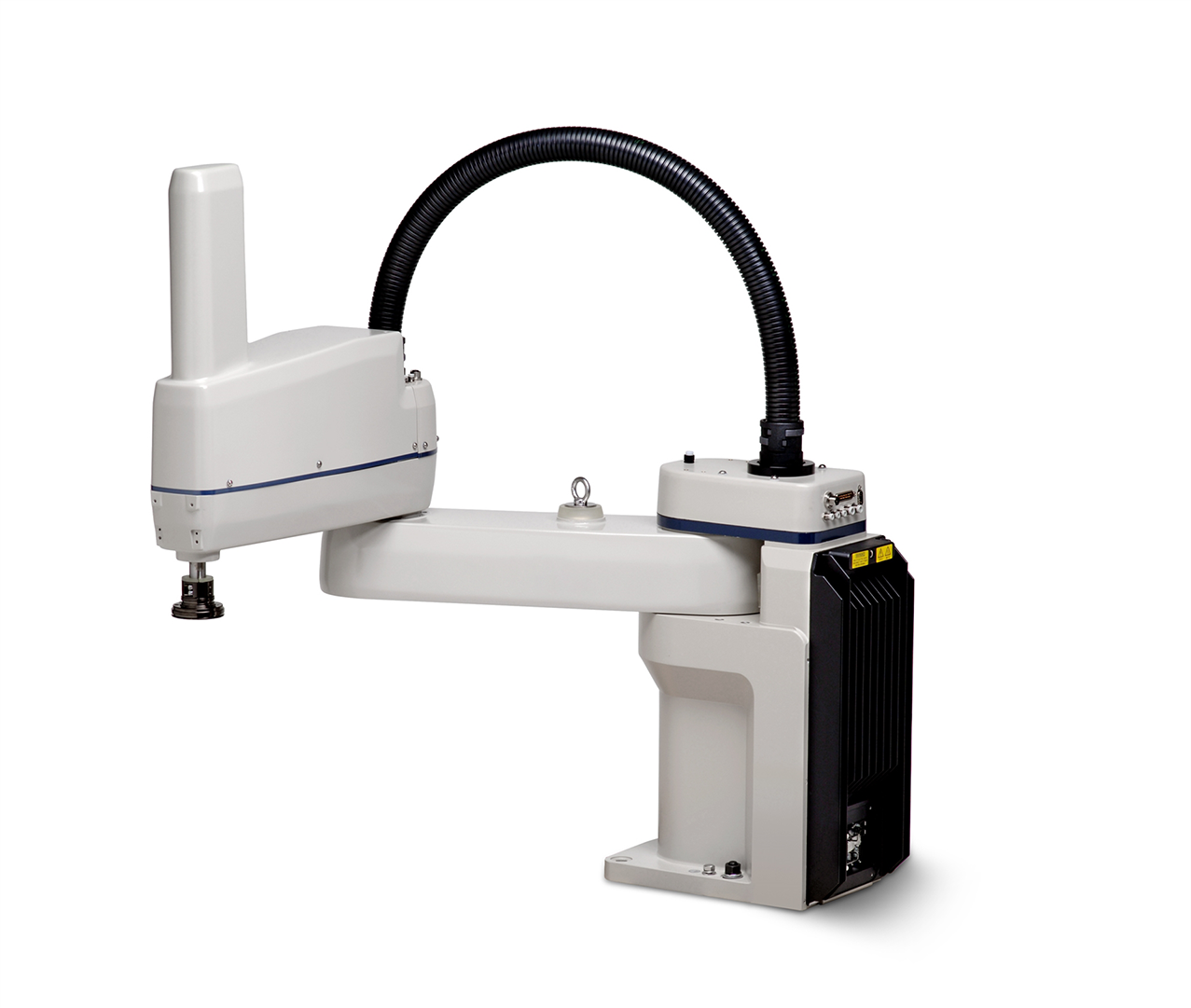
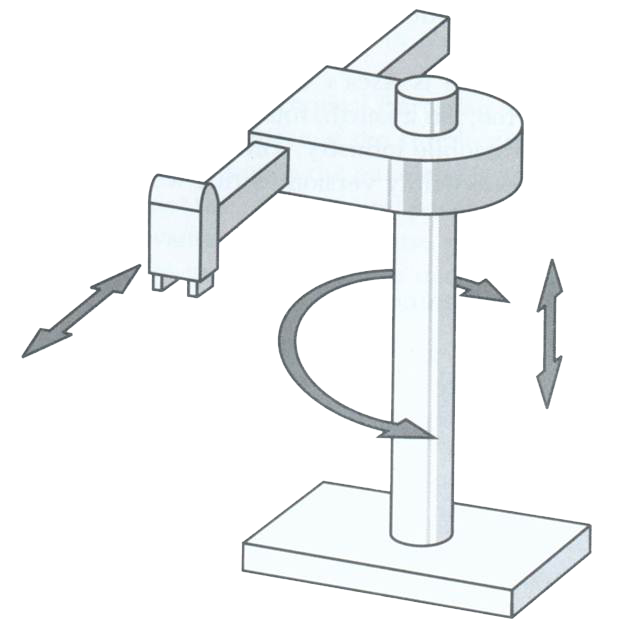
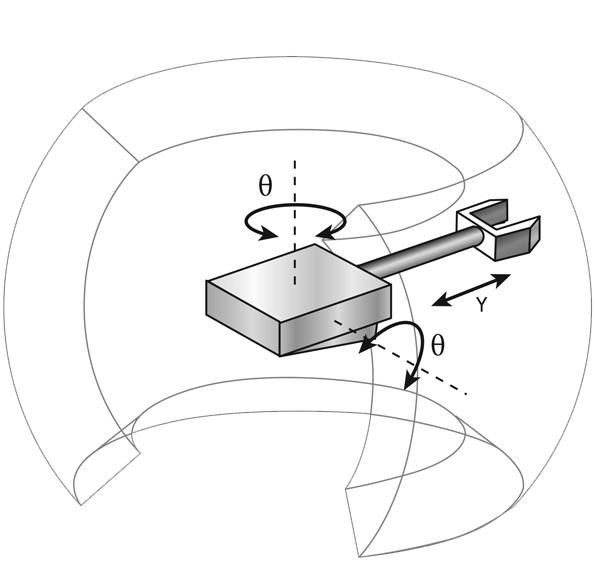
SCARA Robots
SCARA is an acronym that stands for Selective Compliance Assembly Robot Arm or Selective Compliance Articulated Robot Arm. SCARA Robots function on 3-axis (X, Y, and Z), and have a rotary motion as well. SCARA Robots excel in lateral movements and are commonly faster moving and have easier integration than Cartesian Robots. Typically, SCARA robots are used for assembly and palletizing, as well as bio-med application.
Articulated Robots
Articulated Robots mechanical movement and configuration closely resembles a human arm. The arm is mounted to a base with a twisting joint. The arm itself can feature anywhere from two rotary joints up to ten rotary joints which act as axes, with each additional joint or axis allowing for a greater degree of motion. Most Articulated Robots utilize four or six-axis. Typical applications for Articulated Robots are assembly, arc welding, material handling, machine tending, and packaging.

Cylindrical Robots
Cylindrical Robots have a rotary joint at the base and a prismatic joint to connect the links. The robots have a cylindrical-shaped work envelop, which is achieved with rotating shaft and an extendable arm that moves in a vertical and sliding motion. Cylindrical Robots are often used in tight workspaces for simple assembly, machine tending, or coating applications due to their compact design.
Delta Robots
Delta Robots, or parallel robots, possess three arms connected to a single base, which is mounted above the workspace. Delta Robots work in a dome-shape and can move both delicately and precisely at high speeds due to each joint of the end effector being directly controlled by all three arms. Delta Robots are often used for fast pick and place applications in the food, pharmaceutical, and electronic industries.

Polar Robots
Polar Robots, or spherical robots, have an arm with two rotary joints and one linear joint connected to a base with a twisting joint. The axes of the robot work together to form a polar coordinate, which allows the robot to have a spherical work envelope. Polar Robots are credited as one of the first types of industrial robots to ever be developed. Polar robots are commonly used for die casting, injection molding, welding, and material handling.
Collaborative Robots
Collaborative Robots or Cobots are robots that can directly and safely interact with humans in a shared workspace. There are numerous types and brands of collaborative robots on the market – learn more here. Cobots are typically used for pick and place, palletizing, quality inspection, and machine tending.